- TOP
- TEAMS
2020〜2021
TEAM 01
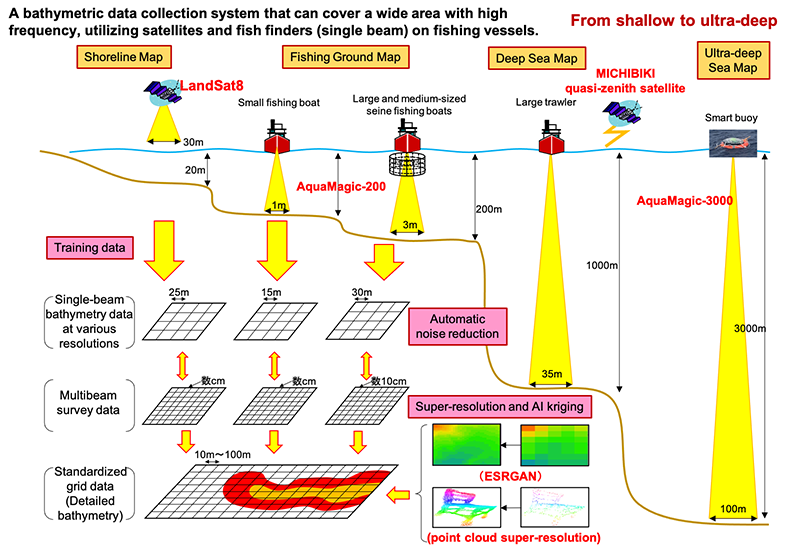
Development of a detailed seafloor topographic map automatic creation system utilizing satellites, single-beam sounders and artificial intelligence
Representative:AquaFusion Co., Ltd.
Constituent organizations
Development theme overview
We will build an automatic sounding data collection system using artificial satellites and single-beam sounders that can measure a wide area frequently at low cost. In particular, for single-beam sounding, based on AquaMagic, which has a high-speed ultrasonic wave transmission function, which is the result of DeSET 2017, we will develop a high-precision sounder for deep sea areas up to a depth of 3000 m in cooperation with the Michibiki Quasi-Zenith Satellite Positioning System. .. Then, the collected sounding data is densified by utilizing the latest machine learning technology, and the topographic map is automatically created. By linking these systems, we aim to handle sounding data with different densities in a unified manner and automatically generate high-quality seafloor topographic maps. As a demonstration experiment, a topographic map will be created on the ultra-deep sea floor from shallower than 20 m to over 2500 m to verify the accuracy of sounding and the practicality of automation.
TEAM 02
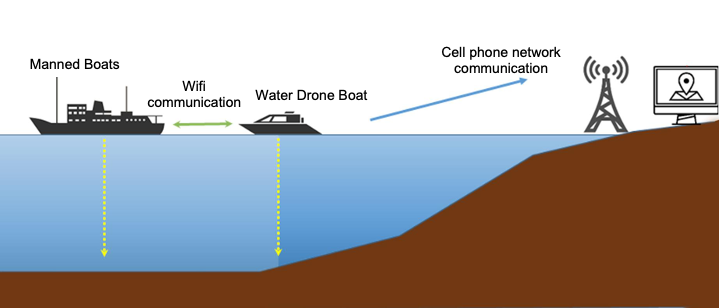
Construction of Simultaneous Wide Area Sea Bottom Mapping System
Representative:Lighthouse Co., Ltd.
Constituent organizations
- Japan Drones Co., Ltd.
- Shimane University
Development theme overview
By "democratizing" the creation of seafloor topographic maps, which could only be carried out by some researchers, researchers, and large-scale projects due to their high level of technology and expertise, the original appeal of the sea was brought out. We aim to add "friendliness". In order to "construct a wide area simultaneous seafloor topography exploration system" using a drone boat for the purpose of overcoming this problem, the following development proposals will be made. The first is the development of a drone boat that can autonomously measure the water depth in the ocean area, the second is the development of a system that automatically integrates the water depth information obtained by multiple drone boats, and the third is the seafloor topographic map. Proposal of trial operation and system improvement aiming at social implementation of. With the autonomous operation of multiple drone boats, the system significantly reduces the time, effort and cost required for traditional research to less than a fraction, a whole new advance for seafloor topographic mapping. Aim to realize a system.
TEAM 03
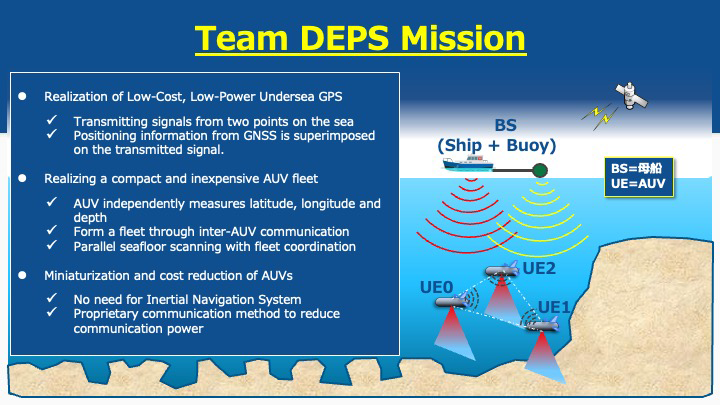
Achieve a compact and inexpensive AUV fleet with low-cost, low-power-consumption underwater GPS
Representative:Magna Design Net Co., Ltd.
Constituent organizations
- GK Chief Uemon
- Ryukyu University
- Oxytech Co., Ltd.
- Okinawa National College of Technology
Development theme overview
The average depth of the ocean is 3000 m or more, and an AUV seafloor scan is required to obtain a deep seafloor map with high accuracy. GNSS cannot be used in the sea, and its position is grasped by using an inertial navigation system or speed measurement by Doppler velocity log, but the cumulative error is based on distance accumulation by speed integration and direction detection by gyro. There is a problem that such a device becomes large, the power consumption is large, and the AUV becomes large and expensive.
In this proposal, signals including position and time information by GNSS are transmitted into the sea with strong power from two locations, the sea surface mother ship and the buoy towed by it. (1) The three AUVs in the deep sea are based on these two types of signals. By combining distance measurement, depth measurement with a pressure gauge, and distance control by acoustic communication between 3 AUVs, each AUV can grasp the position (latitude, longitude, depth), enabling map scanning with a small, low power consumption AUV fleet. To do.