2017〜2018
TEAM 01
Development of a survey solution that realizes complete offshore unmanned marine surveys
Representative:Shohei Ito Full Depth Co., Ltd.
Constituent organizations
- Toshihiro Maki Institute of Industrial Science, University of Tokyo
- Yasuki Kanazawa Naturalanix Co., Ltd.
- Atsushi Kuramoto Outstanding Technology Co., Ltd.
- Shinji Hiejima Hydrovenus Co., Ltd.
- Hironori Takamitsu Seikou Precision Co., Ltd.
Development theme overview
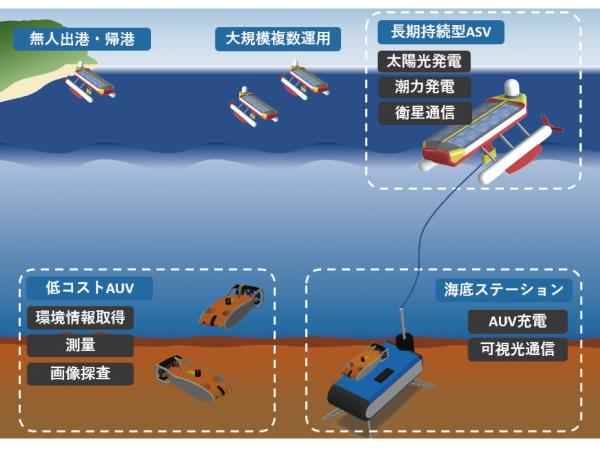
Currently, oceanographic surveys are usually carried out with careful planning in advance and a large number of specialists on board a large research vessel. If you rely only on this method, the survey area will be limited to the planned sea area, it may be interrupted due to bad weather, etc., and fuel costs, labor costs, etc. will be large, so the time efficiency of the survey will be improved. It gets lower. As a result, while a wealth of information could be obtained regarding specific sea areas, the creation of a wide range of seafloor topographic maps has not progressed.
The team aims to develop a long-lasting, fully offshore unmanned oceanographic survey solution. Consists of an autonomous underwater vehicle (ASV), an autonomous underwater vehicle (AUV), an underwater station, etc., which are responsible for all necessary power by offshore power generation (solar power, ocean current, tidal power generation). It is the concept of the system. By realizing these in a small size and at low cost, we will create a state where "unmanned ocean exploration is always carried out" instead of the conventional method of "going out to the sea only when making careful preparations and investigating". Aim for that. Since the realization of this grand vision requires a reasonable period of time and an increase in marine engineering-related engineers, the first goal is to develop a low-cost AUV platform capable of autonomous operation and power supply underwater.
TEAM 02
Realization of seafloor exploration by remote sensing using sound, light, and living things
Representative:Toyoki Sasakura Aqua Sound Co., Ltd.
Constituent organizations
- Akira Hamano National Fisheries Research and Education Agency Fisheries University
- Tatsuyuki Sagawa Remote Sensing Technology Center
- Yo Tanaka National Research and Development Corporation RIKEN
- Nobuyuki Tanaka National Research and Development Corporation RIKEN
Development theme overview
The core of this team is ultrasonic exploration (sonar) technology with an ultra-high-speed transmission cycle, image analysis technology that estimates depth from satellite images, and biotelemetry technology that utilizes marine life. The newly developed sonar technology could not oscillate the next signal until the sound wave reflected off the seabed and returned, but it can transmit hundreds of times per second without waiting for the sound wave to return. As a result, the amount of data collected per unit time can be dramatically increased for the mesopelagic to ultra-deep sea layers. Use satellite images for shallow water areas where acoustic analysis is not good. By estimating the depth through the analysis of color information using multiple satellite images of the same sea area, mapping is performed without exploration using ships. In addition, we will acquire behavioral patterns, ecology, and environmental information of marine organisms using small pinger, logger, and MEMS technology. In the initial development, we will consider the use of electric rays, which are benthic organisms with power generation organs, as non-powered biological agents. Through these, we aim to map ecological information to topographical data as a separate layer.
During this project period, we will promote these technical demonstrations and prototyping, aiming to enable fishing boats and merchant ships to perform detailed topographical exploration and collection of biological information in the surrounding area during normal operation. ..

TEAM 03
Refinement of seafloor topography data and development of deep sea sounding support system using super-resolution technology by machine learning
Representative:Kiyoshi Ito Environmental Simulation Laboratory Co., Ltd.
Constituent organizations
- Masaaki Iiyama Kyoto University
- Michihiro Shonai Ecomott Co., Ltd.
- Mamoru Ozawa Ark Geo Support Co., Ltd.
- Osamu Matsubara QI Co., Ltd.
- Shigeki Toyama Tokyo University of Agriculture and Technology
Development theme overview
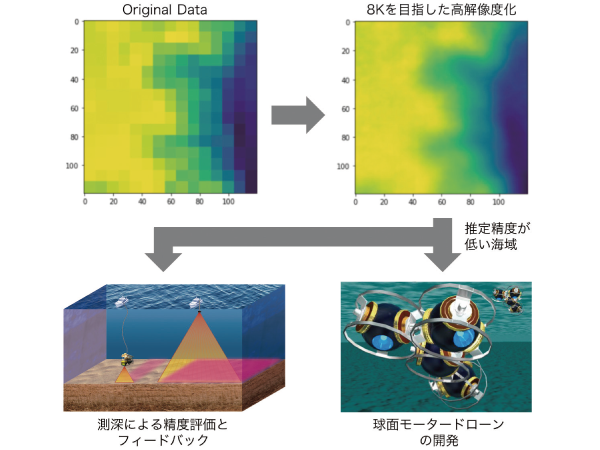
It may not be necessary to explore everything in the first place to obtain topographical information over the vast ocean. This team aims to develop a system that considers coarse seafloor topography data with sounding accuracy as an image and refines it by utilizing "super-resolution technology" that estimates a fine image from a coarse mosaic image. We will develop an algorithm that estimates a fine map from a coarse map using the sea area where a high-definition topographic map already exists as teacher data. This makes it possible to automatically estimate seafloor topography with similar topographical features with high accuracy. In addition, by creating an algorithm that discriminates the sea area with low estimation accuracy, it should be possible to predict the sea area where sounding by AUV etc. should be focused.
In this project, we will develop these systems and evaluate the accuracy of super-resolution by actually measuring the depth. AUV is used to measure the depth of the points where the estimation accuracy is low, and the obtained high-resolution seafloor topography image is fed back as new teacher data. Furthermore, with a view to reducing the cost and unmanned sounding in the future, we will proceed with the technological development of spherical drones using ultrasonic spherical motor technology. Since it is a sphere, it is expected to have high pressure resistance, and it will be possible to aim for the formation of a new category of underwater drones that can handle deep sea areas. Through these efforts, we aim to contribute to the efficiency and cost reduction of offshore oil fields and mineral resource development.