2018〜2019
TEAM 01
Construction of mass-produced undersea and submarine stations
Representative:Hironori Takamitsu Seikou Precision Co., Ltd.
Constituent organizations
Development theme overview
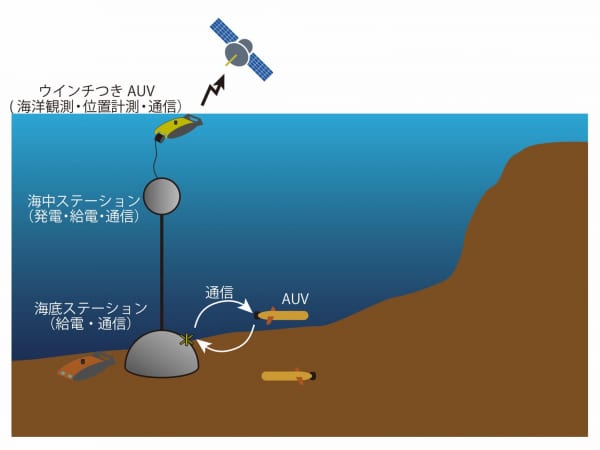
In the current autonomous underwater vehicle (AUV) -based deep measurement data collection, the mother ship needs to stay in the area until the data collection is completed because the AUV returns to the mother ship on a regular basis. If the spots for data collection and power supply can be separated into the sea area, that need will be eliminated and data collection will be accelerated. The team has developed a plan to set up hub stations on the seabed and underwater to collect data and supply AUVs. The mother ship can collect data autonomously just by installing a station at the observation spot.
Development of concrete building manufacturing technology using a 3D printer based on the hypothesis that concrete is suitable as a material for underwater buildings from the viewpoints of compressive strength, cost, deterioration, and recycling for station construction. The goal is to demonstrate.
Specifically, we are aiming to develop a series of systems that can form reinforcing bars and concrete from 3D model data. Furthermore, in order to make it function as an underwater / undersea station, we aim to verify it in the actual sea area by combining it with waterproofing of various electronic devices using pressure resistant resin, docking mechanism with AUV, and communication with a new coil antenna. .. In the future, by installing inexpensive undersea and submarine stations using these technologies in each sea area, we will improve the seismic observation network by quasi-real-time measurement, create detailed seafloor topography and observe bioecology, and create new underwater spaces. I'm thinking of using it as a base for use.
TEAM 02
Multi-platform sounding / environment / ecological observation system using AUV / organism
Representative:Takuya Koizumi Biologging Solutions Co., Ltd.
Representative
Development theme overview
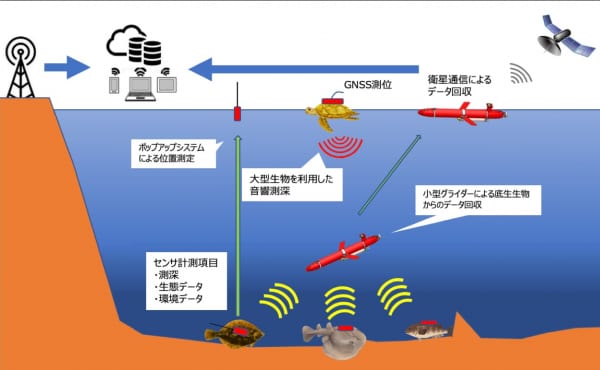
There is a technology called "biologging" that tracks the behavior of living things by attaching a recorder (logger) equipped with various sensors to the living things. While applying this to sounding, this team aims to develop a technology that solves the conventional weakness of poor data collection efficiency.
Benthos such as rays and flatfish are equipped with a logger equipped with a sensor that can acquire environmental data such as depth, water temperature / salt / dissolved oxygen, and acceleration. In order to collect these data, we usually try to capture each attached creature, but this team devised a model that uses a small underwater glider that autonomously navigates in the sea to approach the creature and collects only data from the logger through acoustic communication. .. Here, it is difficult to identify the position where the glider should dive from the ocean, but we aim to solve it by the pop-up tag attached to the logger. The pop-up tag is automatically detached and surfaced to the surface of the water, informing the underwater glider of the location of the desired benthic organism via satellite communications. Furthermore, in order to reduce waste to the sea, we will try to raise it to the surface of the water with an automatic logger separation system and collect it using an autonomous offshore spacecraft (ASV). It also incorporates an approach to acquire data by attaching loggers and small echo sounders to large creatures such as sea turtles that live in the sea. In this way, we are aiming to establish the world's first sounding technology using a mobile platform that moves with its own energy called marine life.
TEAM 03
Submarine AI map creation Open platform construction
Representative:Katsutaka Shindo Lighthouse Co., Ltd.
Constituent organizations
Development theme overview
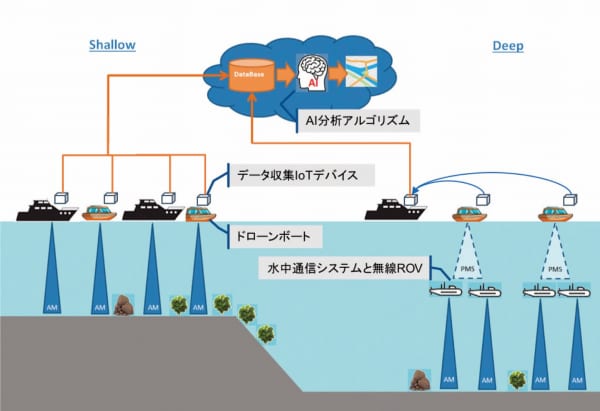
The feature of this team is that it aims to build a platform where anyone can participate in data collection on the seabed while utilizing fishing boats and open source devices. Based on the collected data, AI will be used to autonomously create detailed maps of water depth and sediment.
Until now, seafloor exploration has been entrusted to research institutes and research companies with specialized technology. The conventional method is to operate a large research vessel and analyze the data obtained by sonar exploration to create a topographic map. On the other hand, this team will combine an IoT device that can collect data from a fish finder and an open source small drone boat, and prepare a data collection mechanism in shallow water that makes full use of small fishing boats and leisure boats. In addition, in deep sea areas, we will develop inexpensive wireless ROVs and underwater communication systems, respectively, and challenge the efficient data acquisition by cooperating the above-mentioned drone boat and multiple wireless ROV fleets.
The data collected in each of the shallow and deep waters will be system-developed so that not only water depth but also bottom sediment information such as seagrass beds and school of fish can be obtained at the same time via an AI analysis algorithm developed independently. By presenting user benefits and democratizing seafloor topographic map creation, we will promote faster, higher efficiency, wider range, and lower cost topographic map creation. At the same time, based on the data of the seafloor topography, we will connect it with the distribution of marine resources with industrial value, highly safe route information, marine weather information, etc., and provide people with vast knowledge about the sea. The aim is to make people feel more familiar with.